- Have any questions?
- +91 9176206235
- info@phdsupport.org
PhD in Obstacle Detection and Collision Avoidance for a UAV

PhD in Improvement of Power Distribution system for UAV
June 25, 2021PhD paper writing in RF-Based UAV Detection
June 25, 2021
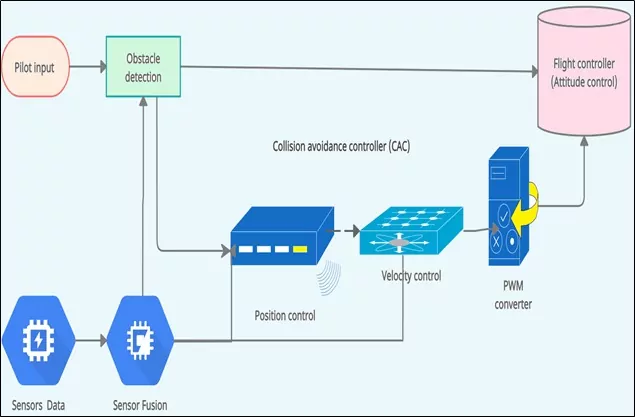
PhD in Obstacle Detection and Collision Avoidance for a UAV
Unmanned aerial vehicle (UAV) is employed in disparate fields these are getting exceptionally famous ongoing occasions along with these form of lines but another application situations to arise. It should be sufficiently quick to create a response without colliding an obstacle.The most important requirement for autonomous flightsis collision avoidance,especially during the numerous solutions for discovery barriers. Collision avoidance exists these arrangements and experience the defective effects of various disadvantages. Obstacle Detection and Collision Avoidance for a UAV is working in a cruel and restricted conditionto buildthe discernment necessities along with control intricacy. It should able to know about its upcoming barrier and keep away from certain impacts, regardless of whether this implies disregarding their essential common objective for self-security perspective.
RESEARCH APPROACH:
Obstacle Detection and Collision Avoidance for a UAV whichflying at low altitude enormously build the likelihood of experiencing obstructions, thus it needs a quick, basic, and vigorous strategy for impact evasion in various environmental scenarios. The execution prospects in an important situation, both a CPU and a GPU arrangement are created, being tried, assessed, and approved invarying climatic conditions. By the implementation of a quick responsive methodology is desirable over manage the obscure since the key thought is to explore in complex conditions utilizing straightforward ways to deal with locally keep away from the most undermining deterrents. It commonly effectively induced the UAV to explore in an unpredictable climate, keeping low handling times both in a lofty PC and in Jetson Nano, a low-power GPU- authorized PC. Thus the guide describes the Octomapsutilized CPU and GPU-Voxels for the GPU discharge. These are the process employed in Obstacle Detection and Collision Avoidance for UAV hasexperimented.
LATEST ISSUES:
- It needs to a fast enough to ascertaining an evasion direction and create an answer without crashing into snags.
- It needs unique consideration in exploring obscure regions when the insight sensor can’t plan during movement.
- The extension of a thorough interrogation in expecting deterrent avoidance inside and out forms the unpredictability of the task
- Due to reliance, the GPU technique requires more opportunity for comparative cycles and the connection among CPU and GPU strategies isn’t steady over the emphasis, which tends to more slow handling
PROPOSED SOLUTION:
- The climate responsive methodology is carried out to covers the Obstacle Detection and evasion of routes in obscure situations.
- The Voxel Map stockpiling strategy is utilized to give a speedy reaction while keeping the crash identification throughput high.
- The WF can be utilized along with a Kalman channel to refresh its fluctuations or without the channel, as it is done here to decrease the computational weight and postponement.
- The EWMA is utilized to decrease the inconvenient disturbance close by subordinate channels
ALGORITHM AND ITS FUNCTIONS:
- The TAF algorithm picks the base pertinent distance as the accessible space into the particular course.
- The SLAM-algorithm is used for situating and self-ruling autonomous flight through its onboard camera.
FUTURE PROPOSAL:
- In the future, the example pace of infrared sensors will be set higher contrasted with the recurrence of a scanner, and by the RP Lidar will be a decent improvement of the referenced arrangement.
- In this proposal ofObstacle Detection and Collision Avoidance for a UAV’s it demonstrated a solution to that limitation by fusing IR and US sensorsto avoid collisions.

{kind=link}