- Have any questions?
- +91 9176206235
- info@phdsupport.org
PhD in Autonomous Control of Unmanned Aerial Vehicles

PhD in 3D Path Planning of Unmanned Aerial Vehicle
June 25, 2021PhD in Energy Consumption in Unmanned Aerial Vehicles
June 25, 2021
PhD in Autonomous Control of Unmanned Aerial Vehicles
Unmanned aerial vehicles (UAVs) are used in different environmental applications like military and civilian domains. For those domains, UAVs need to adopt different conditions on basis of, inspection, reconnaissance, remote sensing, target achievement, border patrol, infrastructure monitoring, aerial imaging, industrial inspection, and emergency medical aid. Autonomous Control of Unmanned Aerial Vehicles must able to make a resolution and respond to events without direct interference by humans. To make UAVs completely autonomous, still it needs many technological and algorithmic developments. For that, UAVs will need certain improvements in their recognizing of obstacles and successive avoidance.
RESEARCH APPROACH:
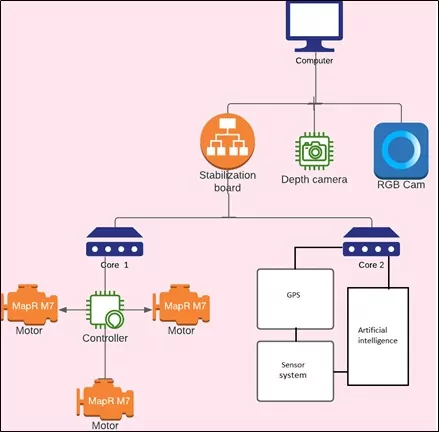
Autonomous Control of Unmanned Aerial Vehicles deals with self-analyzing systems and GPS systems in the existence of artificial intelligence to make decisions to control. There are a certain fundamental featurescommon to all autonomous vehicles which include the recognition abilities and discern the environment, analyzing the sensed information, transmitting, planning and decisions making, as well as acting using control algorithms and actuators. The path planning algorithm helps to define the path and artificial intelligence provides decisions based on the present environment. The control system is trying out in a real-time experiment and,employing simulations exhibits refinements in the hardness of a quadrotor subject to a slung load.Certain experiments are needed to carry out with multiple sets of real times scenarios that are described and signify the efficacy of automation. Thusby this process, the Autonomous Control of Unmanned Aerial Vehicles has experimented.
LATEST ISSUES:
- Still, sensing of obstacles and subsequent avoidance does not satisfy the conditions of complete autonomous UAV application.
- The autonomous UAVs are smaller and light weighted to withstand certain environmental disturbances such asgusty wind.
- It is much harder to land unmanned aerial vehicle in the lacking of similar global positioning system (GPS) signals
- The Safe deplaning of the unmanned aerial vehicle is much harder than the manual process due to excessive load developed on the autonomous controller unit
PROPOSED SOLUTION:
- Swing effect problems on the UAV system are addressed by utilizing a high precision disturbance recompense practice.
- By the utilization of vision and image recognition automation, the locality and attitude of the UAV in three dimensional locations will be estimated.
- 3D path deduction will help to rescuecomputative time and memory contrast with the classical method.
- The Visual inspection helps to learn the surrounding environment and to process this visual data for the autonomous vehicle controller unit.
ALGORITHM AND ITS FUNCTIONS:
- A Decoupling algorithm is utilized to enhance the authenticity of the attitude managementfor the longitudinal shifting strength of a coaxial rotor UAV.
- The distributed swarm control algorithm is utilized in agriculture for the evolution of a multi-UAV system for remote sensing.
- vision-based localization and mapping (SLAM) algorithms is employedfor emergency monocular autonomous landing system
FUTURE PROPOSAL:
- In this proposal of Autonomous Control of Unmanned Aerial Vehicles the path planning algorithm much helpful along with artificial intelligence.
- Eventually, there is a need to analyze the technical aspects of autonomous features in commercializedUnmanned Aerial Vehicles on basis of artificial intelligence, UAV detection, and avoidance technology, battery capacity, image processing, control, and communications.

{kind=link}