- Have any questions?
- +91 9176206235
- info@phdsupport.org
PhD in 3D Path Planning of Unmanned Aerial Vehicle

PhD in Cyber Attacks
June 10, 2021PhD in Autonomous Control of Unmanned Aerial Vehicles
June 25, 2021
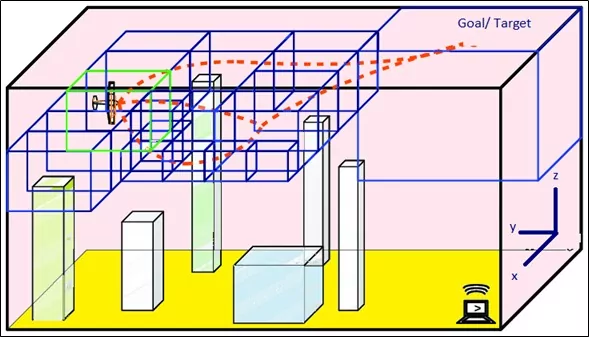
PhD in 3D Path Planning of Unmanned Aerial Vehicle
Unmanned aerial vehicles (UAVs) will help to capturehigh definition aerial photos and it is frequently used for large-scale urban 3D reconstruction purposes.The 3D path planning of unmanned aerial vehicle is now utilized in border defense purpose to analyze through virtual aerial photography. Path planning is one of the most important elements for mission definition and management of manned flight vehicles and it became crucial after the introduction and growth of Unmanned Aerial Vehicles (UAVs), frequently exploiting autonomous flight capabilities. It is important to raise the autonomy level of UAVs for making it more practically useful. The AutonomyUAVs will make their own decisions by processing the captured information obtainedby sensors, and potentially covers the whole range of the vehicle operations without human intervention.
RESEARCH APPROACH:
The Visibility line (VL) method is implied for producing a path with the certain shortest lengthand it is used to develop a three-dimensional path planning algorithm. Here to ensure the distraction-free or collision of an environment 3D path will be planned for that purpose alone we implement a3D path planning algorithm. 3D path planning of unmanned aerial vehicle. A* generates solutions strongly to the suboptimal because of certain fixed limits, and which comes out in any application to path planning. We will perform our method on real and simulated data sets on extensive evaluation in comparison with a state-of-the-art method.Areasonable computational time is required on current results by considering the number of nodes utilized in the graphs. Then, comparing the two graphsof those search methods, the advantages of Theta* become evident. And thus finally this algorithm reduces the length of the track avoiding a considerable number of nodes, requiring just a slightly larger computational time than A*.
LATEST ISSUES:
- It is hard to find cells with the same F-value in certain complex problem based on theirFunctional ambiguity
- It is hard to require a smoothing process to reallocate the waypoints sequences for non-holonomic vehicles like fixed-wing UAVs.
- Functional ambiguities grow substantially with certain increased problems onthe tri-dimensional structure of geometrical ambiguity.
- Still, certain issues occur due to verifying the LOS instead of cells mesh made of nodes.
PROPOSED SOLUTION:
- To take path calculation faster, the number of obstacles used for the calculation has to be minimized employing visibility lines (VL)
- By minimizing the total path length from start to target the locally optimal path is identified
- real-time path planning is capable used to ensure the path from a collision-free environment
- To generate an optimal path over a finite time horizon and distance minimizing is the simple model of the aircraft is one of the possible solutions.
ALGORITHM AND ITS FUNCTION:
- The A* algorithm is utilized to provide an outline the advantages of the solution method for path planning in tri-dimensional environments.
- The evolutionary algorithms are utilized for vehicles path optimization and it is an important solution for permits to apply kinematic constraints
- The trajectory algorithms will reallocate the waypoint sequence to generate optimum solutions by using splines or random threes to the model
FUTURE PROPOSAL:
- In this proposal of 3D path planning of unmanned aerial vehicle a novel viewpoint generation method, based on a prior coarse model reconstructed from an initial flight path to restrict the planned height within the limited distancewhileselectingsignificantviewpointstofully cover the incomplete areas.
- In the future, 3D path planning of unmanned aerial vehicle need tointegrate other automatic and rapid coarse modeling approaches, to further reduction with a computational budget of the coarse reconstruction.

{kind=link}